Definición de un sistema de ecuaciones lineales y su solución. Ejemplos de sistemas de ecuaciones lineales: método de solución
El sistema se llama articulación, o soluble si tiene al menos una solución. El sistema se llama incompatible, o insoluble si no tiene soluciones.
SLAE definida, indefinida.
Si una SLAE tiene solución y es única, entonces se llama cierto y si la solución no es única, entonces incierto.
ECUACIONES MATRICES
Las matrices permiten escribir brevemente el sistema ecuaciones lineales. Sea dado un sistema de 3 ecuaciones con tres incógnitas:
Considere la matriz del sistema  y columnas de matriz de miembros desconocidos y libres
y columnas de matriz de miembros desconocidos y libres 
Busquemos el producto 
aquellos. como resultado del producto, obtenemos los lados izquierdos de las ecuaciones de este sistema. Entonces, usando la definición de igualdad matricial, este sistema se puede escribir como
 o más corto A∙X=B.
o más corto A∙X=B.
Aquí matrices A y B son conocidos, y la matriz X desconocido. Ella necesita ser encontrada, porque. sus elementos son la solución de este sistema. Esta ecuación se llama ecuación matricial.
Sea el determinante de la matriz diferente de cero | A| ≠ 0. Entonces la ecuación matricial se resuelve de la siguiente manera. Multiplica ambos lados de la ecuación de la izquierda por la matriz A-1, la inversa de la matriz A: . Porque el A -1 A = E y mi∙X=X, entonces obtenemos la solución de la ecuación matricial en la forma X = A -1B .
Tenga en cuenta que dado que la matriz inversa solo se puede encontrar para matrices cuadradas, el método de la matriz solo puede resolver aquellos sistemas en los que el numero de ecuaciones es igual al numero de incognitas.
fórmulas de Cramer
El método de Cramer es que encontramos sucesivamente identificador del sistema maestro, es decir. determinante de la matriz A: D = det (a i j) y n determinantes auxiliares D i (i= ), que se obtienen a partir del determinante D reemplazando la i-ésima columna por una columna de miembros libres.
Las fórmulas de Cramer se ven así: D × x i = D i (i = ).
Esto implica la regla de Cramer, que da una respuesta exhaustiva a la cuestión de la compatibilidad del sistema: si el determinante principal del sistema es diferente de cero, entonces el sistema tiene una solución única, determinada por las fórmulas: x i = D i / D.
Si el determinante principal del sistema D y todos los determinantes auxiliares D i = 0 (i= ), entonces el sistema tiene un número infinito de soluciones. Si el determinante principal del sistema D = 0 y al menos un determinante auxiliar es diferente de cero, entonces el sistema es inconsistente.
Teorema (regla de Cramer): Si el determinante del sistema es Δ ≠ 0, entonces el sistema en consideración tiene una y sólo una solución, y 
Prueba: Entonces, considera un sistema de 3 ecuaciones con tres incógnitas. Multiplica la 1ra ecuación del sistema por el complemento algebraico un 11 elemento un 11, segunda ecuación - en A21 y 3º - en Un 31:

Sumemos estas ecuaciones:
Considere cada uno de los corchetes y el lado derecho de esta ecuación. Según el teorema de la expansión del determinante en función de los elementos de la 1ª columna.
De manera similar, se puede demostrar que y .
Finalmente, es fácil ver que 
Así, obtenemos la igualdad: . Como consecuencia, .
Las igualdades y se derivan análogamente, de donde se sigue la afirmación del teorema.
Teorema de Kronecker-Capelli.
Un sistema de ecuaciones lineales es consistente si y solo si el rango de la matriz del sistema es igual al rango de la matriz aumentada.
Prueba: Se descompone en dos etapas.
1. Deje que el sistema tenga una solución. Mostremos eso.
Sea el conjunto de números ![]() es la solución al sistema. Denote por la -ésima columna de la matriz,
es la solución al sistema. Denote por la -ésima columna de la matriz, ![]() . Entonces, es decir, la columna de términos libres es una combinación lineal de las columnas de la matriz. Dejar . pretendamos que
. Entonces, es decir, la columna de términos libres es una combinación lineal de las columnas de la matriz. Dejar . pretendamos que ![]() . Entonces por
. Entonces por ![]() . Elegimos en el menor básico. Tiene orden. La columna de miembros libres debe pasar por este menor, de lo contrario será la base menor de la matriz. La columna de términos libres en menor es una combinación lineal de las columnas de la matriz. En virtud de las propiedades del determinante, donde es el determinante que se obtiene del menor al reemplazar la columna de términos libres por la columna. Si la columna pasa por la M menor, entonces en , habrá dos columnas idénticas y, por tanto, . Si la columna no pasa por el menor, diferirá del menor de orden r + 1 de la matriz solo por el orden de las columnas. Desde entonces . Por lo tanto, lo que contradice la definición de una base menor. Por lo tanto, la suposición de que , es falsa.
. Elegimos en el menor básico. Tiene orden. La columna de miembros libres debe pasar por este menor, de lo contrario será la base menor de la matriz. La columna de términos libres en menor es una combinación lineal de las columnas de la matriz. En virtud de las propiedades del determinante, donde es el determinante que se obtiene del menor al reemplazar la columna de términos libres por la columna. Si la columna pasa por la M menor, entonces en , habrá dos columnas idénticas y, por tanto, . Si la columna no pasa por el menor, diferirá del menor de orden r + 1 de la matriz solo por el orden de las columnas. Desde entonces . Por lo tanto, lo que contradice la definición de una base menor. Por lo tanto, la suposición de que , es falsa.
2. Deja . Demostremos que el sistema tiene solución. Ya que, entonces la base menor de la matriz es la base menor de la matriz. Deja que las columnas pasen por el menor. ![]() . Entonces, por el teorema menor de la base en una matriz, la columna de términos libres es una combinación lineal de las columnas indicadas:
. Entonces, por el teorema menor de la base en una matriz, la columna de términos libres es una combinación lineal de las columnas indicadas:
| (1) |
Fijamos , , , , y tomamos las incógnitas restantes como cero. Entonces para estos valores obtenemos
En virtud de la igualdad (1) . La última igualdad significa que el conjunto de números ![]() es la solución al sistema. Se prueba la existencia de una solución.
es la solución al sistema. Se prueba la existencia de una solución.
En el sistema discutido anteriormente ![]() , y el sistema es consistente. En el sistema , , y el sistema es inconsistente.
, y el sistema es consistente. En el sistema , , y el sistema es inconsistente.
Nota: Aunque el teorema de Kronecker-Capelli permite determinar si un sistema es consistente, se usa muy raramente, principalmente en estudios teóricos. La razón es que los cálculos realizados para encontrar el rango de una matriz son básicamente los mismos que los cálculos para encontrar una solución al sistema. Por lo tanto, normalmente en lugar de encontrar y , se busca una solución al sistema. Si se puede encontrar, entonces aprendemos que el sistema es consistente y simultáneamente obtenemos su solución. Si no se puede encontrar una solución, entonces concluimos que el sistema es inconsistente.
Algoritmo para encontrar soluciones a un sistema arbitrario de ecuaciones lineales (método de Gauss)
Sea dado un sistema de ecuaciones lineales con incógnitas. Se requiere encontrar su solución general si es consistente, o establecer su inconsistencia. El método que se presentará en esta sección es similar al método de calcular el determinante y al método de encontrar el rango de una matriz. El algoritmo propuesto se llama método de Gauss o método de eliminación sucesiva de incógnitas.
Escribamos la matriz aumentada del sistema

A las siguientes operaciones con matrices las llamamos operaciones elementales:
1. permutación de líneas;
2. multiplicar una cadena por un número distinto de cero;
3. suma de una cadena con otra cadena multiplicada por un número.
Tenga en cuenta que al resolver un sistema de ecuaciones, a diferencia de calcular el determinante y encontrar el rango, no se puede operar con columnas. Si se restituye el sistema de ecuaciones a partir de la matriz obtenida realizando una operación elemental, entonces el nuevo sistema será equivalente al original.
El propósito del algoritmo es, mediante la aplicación de una secuencia de operaciones elementales a la matriz, asegurar que cada fila, excepto quizás la primera, comience con ceros, y el número de ceros hasta el primer elemento distinto de cero en cada siguiente fila es mayor que en la anterior.
El paso del algoritmo es el siguiente. Encuentre la primera columna distinta de cero en la matriz. Que sea una columna con el número . Encontramos un elemento distinto de cero en él e intercambiamos la línea con este elemento con la primera línea. Para no acumular notación adicional, supondremos que ya se ha realizado dicho cambio de filas en la matriz, es decir, . Luego a la segunda línea le sumamos el primero multiplicado por el número, a la tercera línea le sumamos el primero multiplicado por el número, etc. Como resultado, obtenemos la matriz

(Por lo general, faltan las primeras columnas nulas).
Si hay una fila con el número k en la matriz, en la que todos los elementos son iguales a cero, y entonces detenemos la ejecución del algoritmo y concluimos que el sistema es inconsistente. De hecho, restableciendo el sistema de ecuaciones de la matriz extendida, obtenemos que la -ésima ecuación tendrá la forma ![]()
Esta ecuación no satisface ningún conjunto de números. ![]() .
.
La matriz se puede escribir como 

Con respecto a la matriz, realizamos el paso descrito del algoritmo. Obtener la matriz

dónde , . Esta matriz se puede escribir de nuevo como

y el paso anterior del algoritmo se aplica nuevamente a la matriz.
El proceso se detiene si después de la ejecución del siguiente paso la nueva matriz reducida consta solo de ceros o si se agotan todas las filas. Tenga en cuenta que la conclusión sobre la incompatibilidad del sistema podría detener el proceso incluso antes.
Si no redujéramos la matriz, al final llegaríamos a una matriz de la forma

A continuación, se realiza el llamado paso inverso del método de Gauss. Con base en la matriz, componemos un sistema de ecuaciones. En el lado izquierdo, dejamos las incógnitas con números correspondientes a los primeros elementos distintos de cero en cada línea, es decir, . Darse cuenta de . Las incógnitas restantes se transfieren al lado derecho. Considerando que las incógnitas del lado derecho son cantidades fijas, es fácil expresar las incógnitas del lado izquierdo en términos de ellas.
Ahora, dando valores arbitrarios a las incógnitas del lado derecho y calculando los valores de las variables del lado izquierdo, encontraremos varias soluciones al sistema original Ax=b. Para escribir la solución general, es necesario indicar las incógnitas en el lado derecho en cualquier orden con letras ![]() , incluidas aquellas incógnitas que no se escriben explícitamente en el lado derecho debido a los coeficientes cero, y luego la columna de incógnitas se puede escribir como una columna, donde cada elemento es una combinación lineal de valores arbitrarios
, incluidas aquellas incógnitas que no se escriben explícitamente en el lado derecho debido a los coeficientes cero, y luego la columna de incógnitas se puede escribir como una columna, donde cada elemento es una combinación lineal de valores arbitrarios ![]() (en particular, solo un valor arbitrario). Esta entrada será la solución general del sistema.
(en particular, solo un valor arbitrario). Esta entrada será la solución general del sistema.
Si el sistema fuera homogéneo, entonces obtenemos la solución general del sistema homogéneo. Los coeficientes a tomados en cada elemento de la columna de la solución general constituirán la primera solución del sistema fundamental de soluciones, los coeficientes a - la segunda solución, y así sucesivamente.
Método 2: El sistema fundamental de soluciones de un sistema homogéneo se puede obtener de otra forma. Para hacer esto, a una variable, transferida al lado derecho, se le debe asignar el valor 1, y el resto, ceros. Calculando los valores de las variables del lado izquierdo, obtenemos una solución del sistema fundamental. Asignando el valor 1 a la otra variable del lado derecho, y ceros a las demás, obtenemos la segunda solución del sistema fundamental, y así sucesivamente.
Definición: el sistema se llama en conjunto th, si tiene al menos una solución, e inconsistente; de lo contrario, es decir, en el caso de que el sistema no tenga soluciones. La cuestión de si un sistema tiene solución o no está relacionada no solo con la relación entre el número de ecuaciones y el número de incógnitas. Por ejemplo, un sistema de tres ecuaciones con dos incógnitas
 |
tiene solución, e incluso tiene infinitas soluciones, pero es un sistema de dos ecuaciones con tres incógnitas.
……. … ……
UN metro 1 x 1 + … + un mn x norte = 0
Este sistema siempre es consistente ya que tiene solución trivial x 1 =…=x n =0
Para que existan soluciones no triviales, es necesario y suficiente que
condiciones r = r(A)< n , что равносильно условию det(A)=0, когда матрица А – квадратная.
el El conjunto de soluciones SLAE forma un espacio lineal de dimensión (n-r). Esto quiere decir que el producto de su solución por un número, así como la suma y combinación lineal de un número finito de sus soluciones, son soluciones de este sistema. El espacio solución lineal de cualquier SLAE es un subespacio del espacio R n .
Cualquier conjunto de (n-r) soluciones linealmente independientes de una SLAE (que es una base en el espacio de soluciones) se llama conjunto fundamental de soluciones (FSR).
Sean х 1 ,…,х r incógnitas básicas, х r +1 ,…,х n incógnitas libres. Damos los siguientes valores a las variables libres a su vez:
……. … ……
UN metro 1 x 1 + … + un mn x norte = 0
Forma un espacio lineal S (espacio de soluciones), que es un subespacio en R n (n es el número de incógnitas), y dims=k=n-r, donde r es el rango del sistema. La base en el espacio de soluciones (x (1) ,…, x (k) ) se llama el sistema fundamental de soluciones, y la solución general tiene la forma:
X=c 1 x (1) + … + c k x (k) , c (1) ,…, c (k) ? R
Ejemplo 1. Encuentre una solución general y alguna solución particular del sistemaSolución hazlo con una calculadora. Escribimos las matrices extendida y principal: 
La línea punteada separa la matriz principal A. Escribimos los sistemas desconocidos desde arriba, teniendo en cuenta la posible permutación de los términos en las ecuaciones del sistema. Determinando el rango de la matriz extendida, encontramos simultáneamente el rango de la matriz principal. En la matriz B, la primera y la segunda columna son proporcionales. De las dos columnas proporcionales, solo una puede caer en el menor básico, así que movamos, por ejemplo, la primera columna más allá de la línea discontinua con el signo opuesto. Para el sistema, esto significa la transferencia de términos de x 1 al lado derecho de las ecuaciones. 
Llevamos la matriz a una forma triangular. Trabajaremos solo con filas, ya que multiplicar una fila de una matriz por un número distinto de cero y agregarlo a otra fila para el sistema significa multiplicar la ecuación por el mismo número y agregarla a otra ecuación, lo que no cambia la solución. del sistema. Trabajando con la primera fila: multiplique la primera fila de la matriz por (-3) y súmela a la segunda y tercera fila por turno. Luego multiplicamos la primera fila por (-2) y la sumamos a la cuarta. 
La segunda y tercera línea son proporcionales, por lo tanto, una de ellas, por ejemplo la segunda, se puede tachar. Esto equivale a eliminar la segunda ecuación del sistema, ya que es consecuencia de la tercera. 
Ahora trabajamos con la segunda línea: multiplícala por (-1) y súmala a la tercera. 
El menor, rodeado por una línea de puntos, tiene orden más alto(de los posibles menores) y es diferente de cero (es igual al producto de los elementos de la diagonal principal), y este menor pertenece tanto a la matriz principal como a la extendida, por lo tanto rangA = rangB = 3 .
Menor  es basico Incluye coeficientes para las incógnitas x 2, x 3, x 4, lo que significa que las incógnitas x 2, x 3, x 4 son dependientes y x 1, x 5 son libres.
es basico Incluye coeficientes para las incógnitas x 2, x 3, x 4, lo que significa que las incógnitas x 2, x 3, x 4 son dependientes y x 1, x 5 son libres.
Transformamos la matriz, dejando solo el menor básico a la izquierda (que corresponde al punto 4 del algoritmo de solución anterior). 
El sistema con coeficientes de esta matriz es equivalente al sistema original y tiene la forma
Por el método de eliminación de incógnitas encontramos: ![]() , ,
, ,
Obtuvimos relaciones que expresan las variables dependientes x 2, x 3, x 4 a través de x 1 y x 5 libres, es decir, encontramos una solución general: 
Dando valores arbitrarios a las incógnitas libres, obtenemos cualquier número de soluciones particulares. Encontremos dos soluciones particulares:
1) sea x 1 = x 5 = 0, entonces x 2 = 1, x 3 = -3, x 4 = 3;
2) poner x 1 = 1, x 5 = -1, luego x 2 = 4, x 3 = -7, x 4 = 7.
Por lo tanto, encontramos dos soluciones: (0.1, -3,3,0) - una solución, (1.4, -7.7, -1) - otra solución.
Ejemplo 2. Investigar la compatibilidad, encontrar una solución general y una particular del sistema. 
Solución. Reorganicemos la primera y la segunda ecuación para tener una unidad en la primera ecuación y escribamos la matriz B. 
Obtenemos ceros en la cuarta columna, operando en la primera fila: 
Ahora obtenga los ceros en la tercera columna usando la segunda fila: 
 Las filas tercera y cuarta son proporcionales, por lo que se puede tachar una de ellas sin cambiar el rango:
Las filas tercera y cuarta son proporcionales, por lo que se puede tachar una de ellas sin cambiar el rango:
Multiplica la tercera fila por (-2) y suma a la cuarta: 
Vemos que los rangos de las matrices principal y extendida son 4, y el rango coincide con el número de incógnitas, por lo tanto, el sistema tiene solución única:
;
x 4 \u003d 10- 3x 1 - 3x 2 - 2x 3 \u003d 11.
Ejemplo 3. Examine la compatibilidad del sistema y encuentre una solución, si existe. 
Solución. Componemos la matriz extendida del sistema. 
 Reorganiza las dos primeras ecuaciones para que haya un 1 en la esquina superior izquierda:
Reorganiza las dos primeras ecuaciones para que haya un 1 en la esquina superior izquierda:
Multiplicando la primera fila por (-1), la sumamos a la tercera: 
Multiplica la segunda línea por (-2) y suma a la tercera: 
El sistema es inconsistente, ya que la matriz principal recibió una fila compuesta por ceros, la cual se tacha cuando se encuentra el rango, y la última fila permanece en la matriz extendida, es decir, r B > r A .
Ejercicio. Investigue la compatibilidad de este sistema de ecuaciones y resuélvalo mediante cálculo matricial.
Solución
Ejemplo. Demostrar la compatibilidad de un sistema de ecuaciones lineales y resolverlo de dos formas: 1) por el método de Gauss; 2) Método de Cramer. (ingrese la respuesta en la forma: x1,x2,x3)
Solución :doc :doc :xls
Responder: 2,-1,3.
Ejemplo. Se da un sistema de ecuaciones lineales. Demostrar su compatibilidad. Encuentre una solución general del sistema y una solución particular.
Solución
Responder: x 3 \u003d - 1 + x 4 + x 5; x 2 \u003d 1 - x 4; x 1 = 2 + x 4 - 3x 5
Ejercicio. Encuentre soluciones generales y particulares para cada sistema.
Solución. Estudiamos este sistema utilizando el teorema de Kronecker-Capelli.
Escribimos las matrices extendida y principal:
| 1 | 1 | 14 | 0 | 2 | 0 |
| 3 | 4 | 2 | 3 | 0 | 1 |
| 2 | 3 | -3 | 3 | -2 | 1 |
| x1 | x2 | x3 | x4 | x5 |
Aquí la matriz A está en negrita.
Llevamos la matriz a una forma triangular. Trabajaremos solo con filas, ya que multiplicar una fila de una matriz por un número distinto de cero y agregarlo a otra fila para el sistema significa multiplicar la ecuación por el mismo número y agregarla a otra ecuación, lo que no cambia la solución. del sistema.
Multiplica la primera fila por (3). Multiplique la segunda fila por (-1). Agreguemos la segunda línea a la primera:
| 0 | -1 | 40 | -3 | 6 | -1 |
| 3 | 4 | 2 | 3 | 0 | 1 |
| 2 | 3 | -3 | 3 | -2 | 1 |
Multiplica la segunda fila por (2). Multiplique la tercera fila por (-3). Agreguemos la 3ra línea a la 2da:
| 0 | -1 | 40 | -3 | 6 | -1 |
| 0 | -1 | 13 | -3 | 6 | -1 |
| 2 | 3 | -3 | 3 | -2 | 1 |
Multiplique la segunda fila por (-1). Agreguemos la segunda línea a la primera:
| 0 | 0 | 27 | 0 | 0 | 0 |
| 0 | -1 | 13 | -3 | 6 | -1 |
| 2 | 3 | -3 | 3 | -2 | 1 |
El menor seleccionado tiene el orden más alto (de todos los menores posibles) y es diferente de cero (es igual al producto de los elementos en la diagonal recíproca), y este menor pertenece tanto a la matriz principal como a la extendida, por lo tanto sonó (A) = rang(B) = 3 Dado que el rango de la matriz principal es igual al rango de la extendida, entonces el sistema es colaborativo.
Este menor es básico. Incluye coeficientes para las incógnitas x 1, x 2, x 3, lo que significa que las incógnitas x 1, x 2, x 3 son dependientes (básicas) y x 4, x 5 son libres.
Transformamos la matriz, dejando solo el menor básico a la izquierda.
| 0 | 0 | 27 | 0 | 0 | 0 |
| 0 | -1 | 13 | -1 | 3 | -6 |
| 2 | 3 | -3 | 1 | -3 | 2 |
| x1 | x2 | x3 | x4 | x5 |
27x3=
- x 2 + 13x 3 = - 1 + 3x 4 - 6x 5
2x 1 + 3x 2 - 3x 3 = 1 - 3x 4 + 2x 5
Por el método de eliminación de incógnitas encontramos:
Obtuvimos relaciones que expresan variables dependientes x 1, x 2, x 3 a través de x 4, x 5 libres, es decir, encontramos decisión común:
x3 = 0
x2 = 1 - 3x4 + 6x5
x 1 = - 1 + 3x 4 - 8x 5
incierto, porque tiene más de una solución.
Ejercicio. Resuelve el sistema de ecuaciones.
Responder:x 2 = 2 - 1,67x 3 + 0,67x 4
x 1 = 5 - 3,67x 3 + 0,67x 4
Dando valores arbitrarios a las incógnitas libres, obtenemos cualquier número de soluciones particulares. el sistema es incierto
Investigar la compatibilidad de un sistema de ecuaciones agebraicas lineales (SLAE) significa averiguar si este sistema tiene soluciones o no. Bueno, si hay soluciones, indique cuántas de ellas.
Necesitaremos información del tema "Sistema de ecuaciones algebraicas lineales. Términos básicos. Notación matricial". En particular, se necesitan conceptos como la matriz del sistema y la matriz extendida del sistema, ya que la formulación del teorema de Kronecker-Capelli se basa en ellos. Como de costumbre, la matriz del sistema se denotará con la letra $A$, y la matriz extendida del sistema con la letra $\widetilde(A)$.
Teorema de Kronecker-Capelli
Un sistema de ecuaciones algebraicas lineales es consistente si y solo si el rango de la matriz del sistema es igual al rango de la matriz extendida del sistema, es decir $\rank A=\rang\widetilde(A)$.
Les recuerdo que un sistema se llama conjunto si tiene al menos una solución. El teorema de Kronecker-Capelli dice esto: si $\rang A=\rang\widetilde(A)$, entonces hay una solución; si $\rang A\neq\rang\widetilde(A)$, entonces este SLAE no tiene soluciones (es inconsistente). La respuesta a la pregunta sobre el número de estas soluciones viene dada por un corolario del teorema de Kronecker-Capelli. El enunciado del corolario usa la letra $n$, que es igual al número de variables en la SLAE dada.
Corolario del teorema de Kronecker-Capelli
- Si $\rang A\neq\rang\widetilde(A)$, entonces la SLAE es inconsistente (no tiene soluciones).
- Si $\rang A=\rang\widetilde(A)< n$, то СЛАУ является неопределённой (имеет бесконечное количество решений).
- Si $\rang A=\rang\widetilde(A) = n$, entonces la SLAE es definitiva (tiene exactamente una solución).
Tenga en cuenta que el teorema formulado y su corolario no indican cómo encontrar la solución a la SLAE. Con su ayuda, solo puede averiguar si estas soluciones existen o no, y si existen, cuántas.
Ejemplo 1
Explore SLAE $ \left \(\begin(alineado) & -3x_1+9x_2-7x_3=17;\\ & -x_1+2x_2-4x_3=9;\\ & 4x_1-2x_2+19x_3=-42. \end(alineado )\right.$ por consistencia Si el SLAE es consistente, indique el número de soluciones.
Para averiguar la existencia de soluciones a una SLAE dada, utilizamos el teorema de Kronecker-Capelli. Necesitamos la matriz del sistema $A$ y la matriz extendida del sistema $\widetilde(A)$, las escribimos:
$$ A=\left(\begin(matriz) (ccc) -3 & 9 & -7 \\ -1 & 2 & -4 \\ 4 & -2 & 19 \end(matriz) \right);\; \widetilde(A)=\left(\begin(matriz) (ccc|c) -3 & 9 &-7 & 17 \\ -1 & 2 & -4 & 9\\ 4 & -2 & 19 & -42 \end(matriz)\right). $$
Necesitamos encontrar $\rang A$ y $\rang\widetilde(A)$. Hay muchas maneras de hacer esto, algunas de las cuales se enumeran en la sección Matrix Rank. Por lo general, se utilizan dos métodos para estudiar tales sistemas: "Cálculo del rango de una matriz por definición" o "Cálculo del rango de una matriz por el método de transformaciones elementales".
Método número 1. Cálculo de rangos por definición.
Según la definición, el rango es el orden más alto de los menores de la matriz, entre los cuales hay al menos uno distinto de cero. Usualmente, el estudio comienza con los menores de primer orden, pero aquí es más conveniente proceder inmediatamente al cálculo del menor de tercer orden de la matriz $A$. Los elementos del menor de tercer orden están en la intersección de tres filas y tres columnas de la matriz en consideración. Dado que la matriz $A$ contiene solo 3 filas y 3 columnas, el menor de tercer orden de la matriz $A$ es el determinante de la matriz $A$, es decir $\DeltaA$. Para calcular el determinante, aplicamos la fórmula No. 2 del tema "Fórmulas para calcular determinantes de segundo y tercer orden":
$$ \Delta A=\izquierda| \begin(matriz) (ccc) -3 & 9 & -7 \\ -1 & 2 & -4 \\ 4 & -2 & 19 \end(matriz) \right|=-21. $$
Entonces, existe un menor de tercer orden de la matriz $A$, que no es igual a cero. Un menor de 4° orden no se puede componer, ya que requiere 4 filas y 4 columnas, y la matriz $A$ tiene solo 3 filas y 3 columnas. Entonces, el orden más alto de menores de la matriz $A$, entre los cuales hay al menos uno distinto de cero, es igual a 3. Por lo tanto, $\rang A=3$.
También necesitamos encontrar $\rang\widetilde(A)$. Veamos la estructura de la matriz $\widetilde(A)$. Hasta la línea en la matriz $\widetilde(A)$ hay elementos de la matriz $A$, y encontramos que $\Delta A\neq 0$. Por tanto, la matriz $\widetilde(A)$ tiene un menor de tercer orden que no es igual a cero. No podemos componer menores de cuarto orden de la matriz $\widetilde(A)$, por lo que concluimos: $\rang\widetilde(A)=3$.
Dado que $\rang A=\rang\widetilde(A)$, según el teorema de Kronecker-Capelli, el sistema es consistente, es decir tiene una solución (al menos una). Para indicar el número de soluciones, tenemos en cuenta que nuestro SLAE contiene 3 incógnitas: $x_1$, $x_2$ y $x_3$. Dado que el número de incógnitas es $n=3$, concluimos: $\rang A=\rang\widetilde(A)=n$, por lo tanto, según el corolario del teorema de Kronecker-Capelli, el sistema es definido, es decir tiene una solución única.
Problema resuelto. ¿Cuáles son las desventajas y ventajas de este método? Primero, hablemos de los profesionales. Primero, necesitábamos encontrar solo un determinante. Después de eso, inmediatamente llegamos a una conclusión sobre el número de soluciones. Por lo general, en los cálculos típicos estándar, se dan sistemas de ecuaciones que contienen tres incógnitas y tienen una única solución. Para tales sistemas este método muy conveniente, porque sabemos de antemano que hay una solución (de lo contrario, no habría ejemplo en un cálculo típico). Aquellos. solo nos queda demostrar que hay solución para los más manera rápida. En segundo lugar, el valor calculado del determinante de la matriz del sistema (es decir, $\Delta A$) será útil más adelante: cuando comencemos a resolver el sistema dado usando el método de Cramer o usando la matriz inversa.
Sin embargo, por definición, el método para calcular el rango no es deseable si la matriz del sistema $A$ es rectangular. En este caso, es mejor aplicar el segundo método, que se discutirá a continuación. Además, si $\Delta A=0$, entonces no podremos decir nada sobre el número de soluciones para un SLAE no homogéneo dado. Tal vez SLAE tenga infinidad de soluciones, o tal vez ninguna. Si $\Delta A=0$ entonces es requerido investigación adicional, que a menudo es engorroso.
Resumiendo lo dicho, observo que el primer método es bueno para aquellas SLAE cuya matriz del sistema es cuadrada. Al mismo tiempo, el SLAE en sí contiene tres o cuatro incógnitas y se toma de cálculos estándar estándar o trabajos de control.
Método número 2. Cálculo del rango por el método de las transformaciones elementales.
Este método se describe en detalle en el tema correspondiente. Calcularemos el rango de la matriz $\widetilde(A)$. ¿Por qué las matrices $\widetilde(A)$ y no $A$? El punto es que la matriz $A$ es parte de la matriz $\widetilde(A)$, por lo que al calcular el rango de la matriz $\widetilde(A)$ encontraremos simultáneamente el rango de la matriz $A$ .
\begin(alineado) &\widetilde(A) =\left(\begin(matriz) (ccc|c) -3 & 9 &-7 & 17 \\ -1 & 2 & -4 & 9\\ 4 & - 2 & 19 & -42 \end(matriz) \right) \rightarrow \left|\text(intercambiar la primera y la segunda línea)\right| \rightarrow \\ &\rightarrow \left(\begin(matriz) (ccc|c) -1 & 2 & -4 & 9 \\ -3 & 9 &-7 & 17\\ 4 & -2 & 19 & - 42 \end(matriz) \right) \begin(matriz) (l) \phantom(0) \\ II-3\cdot I\\ III+4\cdot I \end(matriz) \rightarrow \left(\begin (matriz) (ccc|c) -1 & 2 & -4 & 9 \\ 0 & 3 &5 & -10\\ 0 & 6 & 3 & -6 \end(matriz) \right) \begin(matriz) ( l) \phantom(0) \\ \phantom(0)\\ III-2\cdot II \end(array)\rightarrow\\ &\rightarrow \left(\begin(array) (ccc|c) -1 & 2 & -4 & 9 \\ 0 & 3 &5 & -10\\ 0 & 0 & -7 & 14 \end(matriz) \right) \end(alineado)
Hemos reducido la matriz $\widetilde(A)$ a una forma trapezoidal. En la diagonal principal de la matriz resultante $\left(\begin(array) (ccc|c) -1 & 2 & -4 & 9 \\ 0 & 3 &5 & -10\\ 0 & 0 & -7 & 14 \end( array) \right)$ contiene tres elementos distintos de cero: -1, 3 y -7. Conclusión: el rango de la matriz $\widetilde(A)$ es 3, es decir $\rank\widetilde(A)=3$. Haciendo transformaciones con los elementos de la matriz $\widetilde(A)$, transformamos simultáneamente los elementos de la matriz $A$ ubicados antes de la línea. La matriz $A$ también es trapezoidal: $\left(\begin(array) (ccc) -1 & 2 & -4 \\ 0 & 3 &5 \\ 0 & 0 & -7 \end(array) \right ) ps Conclusión: el rango de la matriz $A$ también es igual a 3, es decir $\rango A=3$.
Dado que $\rang A=\rang\widetilde(A)$, según el teorema de Kronecker-Capelli, el sistema es consistente, es decir tiene solución Para indicar el número de soluciones, tenemos en cuenta que nuestro SLAE contiene 3 incógnitas: $x_1$, $x_2$ y $x_3$. Como el número de incógnitas es $n=3$, concluimos: $\rang A=\rang\widetilde(A)=n$, por lo tanto, según el corolario del teorema de Kronecker-Capelli, el sistema está definido, es decir tiene una solución única.
¿Cuáles son las ventajas del segundo método? La principal ventaja es su versatilidad. No nos importa si la matriz del sistema es cuadrada o no. Además, en realidad hemos llevado a cabo transformaciones del método de Gauss hacia adelante. Solo quedan un par de pasos y podríamos llegar a la solución de este SLAE. La verdad es que me gusta más la segunda que la primera, pero la elección es cuestión de gustos.
Responder: El SLAE dado es consistente y definido.
Ejemplo #2
Explora SLAE $ \left\( \begin(aligned) & x_1-x_2+2x_3=-1;\\ & -x_1+2x_2-3x_3=3;\\ & 2x_1-x_2+3x_3=2;\\ & 3x_1- 2x_2+5x_3=1;\\ & 2x_1-3x_2+5x_3=-4.\end(alineado) \right.$ por consistencia.
Hallaremos los rangos de la matriz del sistema y la matriz extendida del sistema por el método de las transformaciones elementales. Matriz de sistema extendida: $\widetilde(A)=\left(\begin(array) (ccc|c) 1 & -1 & 2 & -1\\ -1 & 2 & -3 & 3 \\ 2 & -1 & 3 & 2 \\ 3 & -2 & 5 & 1 \\ 2 & -3 & 5 & -4 \end(matriz) \right)$. Encontremos los rangos requeridos transformando la matriz aumentada del sistema:

La matriz extendida del sistema se reduce a una forma escalonada. Si la matriz se reduce a una forma escalonada, entonces su rango es igual al número de filas distintas de cero. Por lo tanto, $\rango A=3$. La matriz $A$ (hasta la línea) se reduce a forma trapezoidal y su rango es igual a 2, $\rang A=2$.

Dado que $\rang A\neq\rang\widetilde(A)$, entonces, según el teorema de Kronecker-Capelli, el sistema es inconsistente (es decir, no tiene soluciones).
Responder: El sistema es inconsistente.
Ejemplo #3
Explora SLAE $ \left\( \begin(aligned) & 2x_1+7x_3-5x_4+11x_5=42;\\ & x_1-2x_2+3x_3+2x_5=17;\\ & -3x_1+9x_2-11x_3-7x_5=-64 ;\\ & -5x_1+17x_2-16x_3-5x_4-4x_5=-90;\\ & 7x_1-17x_2+23x_3+15x_5=132.\end(alineado) \right.$ para compatibilidad.
La matriz del sistema extendido es: $\widetilde(A)=\left(\begin(array) (ccccc|c) 2 & 0 & 7 & -5 & 11 & 42\\ 1 & -2 & 3 & 0 & 2 & 17 \\ -3 & 9 & -11 & 0 & -7 & -64 \\ -5 & 17 & -16 & -5 & -4 & -90 \\ 7 & -17 & 23 & 0 & 15 & 132 \end(matriz)\derecha)$. Intercambie la primera y la segunda fila de esta matriz para que el primer elemento de la primera fila sea uno: $\left(\begin(array) (ccccc|c) 1 & -2 & 3 & 0 & 2 & 17\\ 2 & 0 & 7 & -5 & 11 & 42 \\ -3 & 9 & -11 & 0 & -7 & -64 \\ -5 & 17 & -16 & -5 & -4 & -90 \\ 7 & -17 & 23 & 0 & 15 & 132 \end(matriz) \right)$.

Hemos reducido la matriz extendida del sistema y la matriz del sistema mismo a una forma trapezoidal. El rango de la matriz extendida del sistema es igual a tres, el rango de la matriz del sistema también es igual a tres. Dado que el sistema contiene $n=5$ incógnitas, es decir $\rang\widetilde(A)=\rank A< n$, то согласно следствия из теоремы Кронекера-Капелли este sistema es indefinido, es decir tiene un número infinito de soluciones.
Responder: el sistema es indeterminado.
En la segunda parte, analizaremos ejemplos que suelen incluirse en cálculos estándar o pruebas en matemáticas superiores: un estudio de compatibilidad y resolución de SLAE en función de los valores de los parámetros incluidos en él.
- Sistemas metro ecuaciones lineales con norte desconocido.
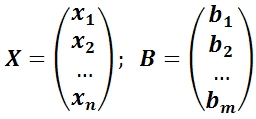
Resolver un sistema de ecuaciones lineales es tal conjunto de números ( x 1 , x 2 , …, x norte), sustituyendo lo cual en cada una de las ecuaciones del sistema se obtiene la igualdad correcta.
dónde a ij , i = 1, …, m; j = 1, …, norte son los coeficientes del sistema;
segundo yo , yo = 1, …, metro- miembros libres;
x j , j = 1, …, norte- desconocido.
El sistema anterior se puede escribir en forma matricial: UNA X = B,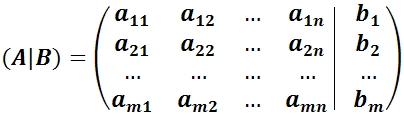
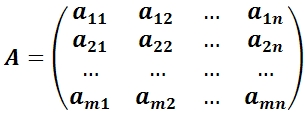
dónde ( A|B) es la matriz principal del sistema;
A— matriz ampliada del sistema;
X— columna de incógnitas;
B es una columna de miembros libres.
Si la matriz B no es una matriz nula ∅, entonces este sistema de ecuaciones lineales se llama no homogéneo.
Si la matriz B= ∅, entonces este sistema de ecuaciones lineales se llama homogéneo. Un sistema homogéneo siempre tiene una solución cero (trivial): x 1 \u003d x 2 \u003d ..., x n \u003d 0.
Sistema conjunto de ecuaciones lineales es un sistema de ecuaciones lineales que tiene solución.
Sistema inconsistente de ecuaciones lineales es un sistema de ecuaciones lineales que no tiene solución.
Cierto sistema de ecuaciones lineales es un sistema de ecuaciones lineales que tiene solución única.
Sistema indefinido de ecuaciones lineales es un sistema de ecuaciones lineales que tiene un número infinito de soluciones. - Sistemas de n ecuaciones lineales con n incógnitas
Si el número de incógnitas es igual al número de ecuaciones, entonces la matriz es cuadrada. El determinante de la matriz se denomina determinante principal del sistema de ecuaciones lineales y se denota con el símbolo Δ.
método Cramer para resolver sistemas norte ecuaciones lineales con norte desconocido.
Regla de Cramer.
Si el determinante principal de un sistema de ecuaciones lineales no es igual a cero, entonces el sistema es consistente y definido, y la única solución se calcula usando las fórmulas de Cramer:
donde Δ i son los determinantes obtenidos a partir del determinante principal del sistema Δ reemplazando iª columna a la columna de miembros libres. . - Sistemas de m ecuaciones lineales con n incógnitas
Teorema de Kronecker-Cappelli.
Para que este sistema de ecuaciones lineales sea consistente, es necesario y suficiente que el rango de la matriz del sistema sea igual al rango de la matriz extendida del sistema, rango(Α) = rango(Α|B).
si un sonó(Α) ≠ sonó(Α|B), entonces el sistema obviamente no tiene soluciones.
Si rango(Α) = rango(Α|B), entonces son posibles dos casos:
1) sonó(Α) = norte(al número de incógnitas) - la solución es única y se puede obtener mediante las fórmulas de Cramer;
2) rango (Α)< n − hay infinitas soluciones. - método de Gauss para resolver sistemas de ecuaciones lineales
Compongamos la matriz aumentada ( A|B) del sistema dado de coeficientes en los lados desconocido y derecho.
El método gaussiano o método de eliminación de incógnitas consiste en reducir la matriz aumentada ( A|B) con la ayuda de transformaciones elementales sobre sus filas a una forma diagonal (a una forma triangular superior). Volviendo al sistema de ecuaciones, se determinan todas las incógnitas.
Las transformaciones elementales en cadenas incluyen lo siguiente:
1) intercambiar dos líneas;
2) multiplicar una cadena por un número distinto de 0;
3) agregar a la cadena otra cadena multiplicada por un número arbitrario;
4) descartar una cadena nula.
Una matriz extendida reducida a una forma diagonal corresponde a sistema lineal, equivalente al dado, cuya solución no presenta dificultades. . - Sistema de ecuaciones lineales homogéneas.
El sistema homogéneo tiene la forma:
corresponde a la ecuación matricial UNA X = 0.
1) Un sistema homogéneo es siempre consistente, ya que r(A) = r(A|B), siempre hay una solución cero (0, 0, …, 0).
2) Para que un sistema homogéneo tenga una solución distinta de cero, es necesario y suficiente que r = r(A)< n , que es equivalente a Δ = 0.
3) Si r< n , entonces Δ = 0, entonces hay incógnitas libres c 1 , c 2 , ..., c nr, el sistema tiene soluciones no triviales, y hay infinitas de ellas.
4) Solución general X a r< n puede escribirse en forma matricial como sigue:
X \u003d c 1 X 1 + c 2 X 2 + ... + c n-r X n-r,
donde estan las soluciones X 1 , X 2 , …, X n-r forman un sistema fundamental de soluciones.
5) A partir de la solución general del sistema homogéneo se puede obtener el sistema fundamental de soluciones: ,
,
si asumimos secuencialmente que los valores de los parámetros son (1, 0, …, 0), (0, 1, …, 0), …, (0, 0, …, 1).
Descomposición de la solución general en términos del sistema fundamental de soluciones es un registro de la solución general como combinación lineal de soluciones pertenecientes al sistema fundamental.
Teorema. Para que un sistema de ecuaciones lineales homogéneas tenga una solución distinta de cero, es necesario y suficiente que Δ ≠ 0.
Entonces, si el determinante es Δ ≠ 0, entonces el sistema tiene una solución única.
Si Δ ≠ 0, entonces el sistema de ecuaciones lineales homogéneas tiene un número infinito de soluciones.
Teorema. Para que un sistema homogéneo tenga una solución distinta de cero, es necesario y suficiente que real academia de bellas artes)< n .
Prueba:
1) r no puede ser más norte(el rango de la matriz no excede el número de columnas o filas);
2) r< n , porque si r=n, entonces el determinante principal del sistema Δ ≠ 0, y, de acuerdo con las fórmulas de Cramer, existe una única solución trivial x 1 \u003d x 2 \u003d ... \u003d x n \u003d 0, lo que contradice la condición. Medio, real academia de bellas artes)< n .
Consecuencia. Para un sistema homogéneo norte ecuaciones lineales con norte incógnitas tiene una solución distinta de cero, es necesario y suficiente que Δ = 0.
dónde X* - una de las soluciones del sistema no homogéneo (2) (por ejemplo (4)), (E-A + A) forma el núcleo (espacio cero) de la matriz A.
Hagamos una descomposición esquelética de la matriz. (E-A + A):
E−A + A=Q S
dónde q n×n−r- matriz de rango (Q)=n−r, S n−r×n-matriz de rango (S)=n−r.
Entonces (13) se puede escribir de la siguiente forma:
x=x*+Qk, ∀ k ∈ R n-r.
dónde k=Tamaño.
Asi que, procedimiento general de solucion sistema de ecuaciones lineales usando pseudo matriz inversa puede presentarse de la siguiente forma:
- Calcular la matriz pseudoinversa A + .
- Calculamos una solución particular del sistema no homogéneo de ecuaciones lineales (2): X*=A + b.
- Comprobamos la compatibilidad del sistema. Para esto calculamos Automóvil club británico + b. si un Automóvil club británico + b≠b, entonces el sistema es inconsistente. De lo contrario, continuamos con el procedimiento.
- vysylyaem E−A+A.
- Haciendo una descomposición esquelética E−A + A=Q·S.
- Construyendo una solución
x=x*+Qk, ∀ k ∈ R n-r.
Resolver un sistema de ecuaciones lineales en línea
La calculadora en línea le permite encontrar la solución general de un sistema de ecuaciones lineales con explicaciones detalladas.