Definizione di un sistema di equazioni lineari e sua soluzione. Esempi di sistemi di equazioni lineari: metodo risolutivo
Il sistema è chiamato giunto, o risolvibile se ha almeno una soluzione. Il sistema è chiamato incompatibile, o insolubile se non ha soluzioni.
SLAE definito, indefinito.
Se uno SLAE ha una soluzione ed è unico, viene chiamato certo e se la soluzione non è unica, allora incerto.
EQUAZIONI DI MATRICE
Le matrici consentono di scrivere brevemente il sistema equazioni lineari. Sia dato un sistema di 3 equazioni con tre incognite:
Considera la matrice del sistema  e colonne di matrice di membri sconosciuti e liberi
e colonne di matrice di membri sconosciuti e liberi 
Troviamo il prodotto 
quelli. come risultato del prodotto, otteniamo i membri di sinistra delle equazioni di questo sistema. Quindi, usando la definizione di uguaglianza di matrici, questo sistema può essere scritto come
 o più breve UN∙X=B.
o più breve UN∙X=B.
Qui matrici UN e B sono noti e la matrice X sconosciuto. Ha bisogno di essere trovata, perché. i suoi elementi sono la soluzione di questo sistema. Questa equazione è chiamata equazione matriciale.
Sia il determinante della matrice diverso da zero | UN| ≠ 0. Quindi l'equazione della matrice viene risolta come segue. Moltiplica entrambi i membri dell'equazione a sinistra per la matrice A-1, l'inverso della matrice UN: . Perché il LA -1 LA = E e e∙X=X, quindi otteniamo la soluzione dell'equazione matriciale nella forma X = LA -1 B .
Si noti che poiché la matrice inversa può essere trovata solo per matrici quadrate, il metodo della matrice può risolvere solo quei sistemi in cui il numero di equazioni è uguale al numero di incognite.
Le formule di Cramer
Il metodo di Cramer è che troviamo successivamente identificatore di sistema principale, cioè. determinante della matrice A: D = det (a i j) e n determinanti ausiliari D i (i= ), che si ottengono dal determinante D sostituendo l'i-esima colonna con una colonna di membri liberi.
Le formule di Cramer sono: D × x i = D i (i = ).
Ciò implica la regola di Cramer, che dà una risposta esauriente alla domanda di compatibilità del sistema: se il determinante principale del sistema è diverso da zero, allora il sistema ha un'unica soluzione, determinata dalle formule: x i = D i / D.
Se il determinante principale del sistema D e tutti i determinanti ausiliari D i = 0 (i= ), allora il sistema ha un numero infinito di soluzioni. Se il determinante principale del sistema D = 0 e almeno un determinante ausiliario è diverso da zero, il sistema è incoerente.
Teorema (regola di Cramer): se il determinante del sistema è Δ ≠ 0, allora il sistema in esame ha una e una sola soluzione, e 
Dimostrazione: Consideriamo quindi un sistema di 3 equazioni con tre incognite. Moltiplica la prima equazione del sistema per il complemento algebrico A 11 elemento un 11, 2a equazione - attiva A21 e 3a - su A 31:

Aggiungiamo queste equazioni:
Considera ciascuna delle parentesi e il lato destro di questa equazione. Secondo il teorema sull'espansione del determinante in termini di elementi della 1a colonna.
Allo stesso modo, si può dimostrare che e .
Alla fine, è facile vederlo 
Quindi, otteniamo l'uguaglianza: . Di conseguenza, .
Le uguaglianze e sono derivate similmente, da cui segue l'asserzione del teorema.
Teorema di Kronecker-Capelli.
Un sistema di equazioni lineari è coerente se e solo se il rango della matrice del sistema è uguale al rango della matrice aumentata.
Prova: Si suddivide in due fasi.
1. Lascia che il sistema abbia una soluzione. Mostriamolo.
Lasciamo l'insieme dei numeri ![]() è la soluzione del sistema. Indichiamo con la -esima colonna della matrice ,
è la soluzione del sistema. Indichiamo con la -esima colonna della matrice , ![]() . Allora, cioè la colonna dei termini liberi è una combinazione lineare delle colonne della matrice. Permettere . Facciamo finta che
. Allora, cioè la colonna dei termini liberi è una combinazione lineare delle colonne della matrice. Permettere . Facciamo finta che ![]() . Poi per
. Poi per ![]() . Scegliamo nel minore di base. Ha ordine. La colonna dei membri liberi deve passare per questo minore, altrimenti sarà il minore di base della matrice. La colonna dei termini liberi in minore è una combinazione lineare delle colonne della matrice. In virtù delle proprietà del determinante, dove è il determinante che si ottiene dal minore sostituendo la colonna dei termini liberi con la colonna. Se la colonna è passata per la M minore, allora in , ci saranno due colonne identiche e, quindi, . Se la colonna non è passata per il minore, differirà dal minore dell'ordine r + 1 della matrice solo per l'ordine delle colonne. Da allora . Pertanto, il che contraddice la definizione di base minore. Quindi, l'ipotesi che , è falsa.
. Scegliamo nel minore di base. Ha ordine. La colonna dei membri liberi deve passare per questo minore, altrimenti sarà il minore di base della matrice. La colonna dei termini liberi in minore è una combinazione lineare delle colonne della matrice. In virtù delle proprietà del determinante, dove è il determinante che si ottiene dal minore sostituendo la colonna dei termini liberi con la colonna. Se la colonna è passata per la M minore, allora in , ci saranno due colonne identiche e, quindi, . Se la colonna non è passata per il minore, differirà dal minore dell'ordine r + 1 della matrice solo per l'ordine delle colonne. Da allora . Pertanto, il che contraddice la definizione di base minore. Quindi, l'ipotesi che , è falsa.
2. Lascia. Mostriamo che il sistema ha una soluzione. Poiché, allora la base minore della matrice è la base minore della matrice. Lascia che le colonne passino per la minore ![]() . Quindi, per il teorema di base minore in una matrice, la colonna di termini liberi è una combinazione lineare delle colonne indicate:
. Quindi, per il teorema di base minore in una matrice, la colonna di termini liberi è una combinazione lineare delle colonne indicate:
| (1) |
Poniamo , , , , e prendiamo le restanti incognite uguali a zero. Quindi per questi valori otteniamo
In virtù dell'uguaglianza (1) . L'ultima uguaglianza significa che l'insieme dei numeri ![]() è la soluzione del sistema. L'esistenza di una soluzione è dimostrata.
è la soluzione del sistema. L'esistenza di una soluzione è dimostrata.
Nel sistema discusso sopra ![]() e il sistema è coerente. Nel sistema , , e il sistema è incoerente.
e il sistema è coerente. Nel sistema , , e il sistema è incoerente.
Nota: sebbene il teorema di Kronecker-Capelli renda possibile determinare se un sistema è consistente, è usato abbastanza raramente, principalmente in studi teorici. Il motivo è che i calcoli eseguiti quando si trova il rango di una matrice sono sostanzialmente gli stessi dei calcoli quando si trova una soluzione del sistema. Pertanto, di solito invece di trovare e , si cerca una soluzione al sistema. Se può essere trovato, allora impariamo che il sistema è coerente e contemporaneamente otteniamo la sua soluzione. Se non è possibile trovare una soluzione, concludiamo che il sistema è incoerente.
Algoritmo per trovare soluzioni ad un sistema arbitrario di equazioni lineari (metodo di Gauss)
Sia dato un sistema di equazioni lineari con incognite. È necessario trovare la sua soluzione generale se è coerente o stabilirne l'incoerenza. Il metodo che verrà presentato in questa sezione è vicino al metodo per calcolare il determinante e al metodo per trovare il rango di una matrice. Viene chiamato l'algoritmo proposto Metodo Gauss o metodo di eliminazione successiva delle incognite.
Scriviamo la matrice aumentata del sistema

Chiamiamo operazioni elementari le seguenti operazioni con matrici:
1. permutazione di linee;
2. moltiplicare una stringa per un numero diverso da zero;
3. somma di una stringa con un'altra stringa moltiplicata per un numero.
Si noti che quando si risolve un sistema di equazioni, contrariamente al calcolo del determinante e alla ricerca del rango, non si può operare con le colonne. Se il sistema di equazioni viene ripristinato dalla matrice ottenuta eseguendo un'operazione elementare, il nuovo sistema sarà equivalente a quello originale.
L'obiettivo dell'algoritmo è, applicando una sequenza di operazioni elementari alla matrice, garantire che ogni riga, eccetto forse la prima, inizi con zeri e il numero di zeri fino al primo elemento diverso da zero in ogni successivo riga è maggiore della precedente.
Il passo dell'algoritmo è il seguente. Trova la prima colonna diversa da zero nella matrice. Sia una colonna con numero . Troviamo un elemento diverso da zero e scambiamo la riga con questo elemento con la prima riga. Per non accumulare notazioni aggiuntive, assumeremo che un tale cambio di righe nella matrice sia già stato effettuato, ovvero . Quindi alla seconda riga aggiungiamo la prima moltiplicata per il numero, alla terza riga aggiungiamo la prima moltiplicata per il numero, ecc. Di conseguenza, otteniamo la matrice

(Le prime colonne null di solito mancano.)
Se la matrice ha una riga con numero k, in cui tutti gli elementi sono uguali a zero, e , interrompiamo l'esecuzione dell'algoritmo e concludiamo che il sistema è incoerente. Infatti, ripristinando il sistema di equazioni dalla matrice estesa, otteniamo che la -esima equazione avrà la forma ![]()
Questa equazione non soddisfa nessun insieme di numeri ![]() .
.
La matrice può essere scritta come 

Per quanto riguarda la matrice, eseguiamo il passaggio descritto dell'algoritmo. Ottieni la matrice

dove , . Questa matrice può essere nuovamente scritta come

e il passaggio precedente dell'algoritmo viene nuovamente applicato alla matrice.
Il processo si interrompe se dopo l'esecuzione del passaggio successivo la nuova matrice ridotta è composta da soli zeri o se tutte le righe sono esaurite. Si noti che la conclusione sull'incompatibilità del sistema potrebbe interrompere il processo anche prima.
Se non riducessimo la matrice, alla fine arriveremmo a una matrice della forma

Successivamente, viene eseguito il cosiddetto passaggio inverso del metodo gaussiano. Sulla base della matrice, componiamo un sistema di equazioni. Sul lato sinistro, lasciamo le incognite con i numeri corrispondenti ai primi elementi diversi da zero in ogni riga, cioè . Notare che . Le restanti incognite vengono trasferite sul lato destro. Considerando le incognite sul lato destro come quantità fisse, è facile esprimere le incognite sul lato sinistro in termini di esse.
Ora, dando valori arbitrari alle incognite sul lato destro e calcolando i valori delle variabili sul lato sinistro, troveremo varie soluzioni al sistema originale Ax=b. Per scrivere la soluzione generale, è necessario indicare le incognite sul lato destro in qualsiasi ordine per lettere ![]() , comprese quelle incognite che non sono scritte esplicitamente sul lato destro a causa di coefficienti zero, e quindi la colonna delle incognite può essere scritta come una colonna, dove ogni elemento è una combinazione lineare di valori arbitrari
, comprese quelle incognite che non sono scritte esplicitamente sul lato destro a causa di coefficienti zero, e quindi la colonna delle incognite può essere scritta come una colonna, dove ogni elemento è una combinazione lineare di valori arbitrari ![]() (in particolare, solo un valore arbitrario). Questa voce sarà la soluzione generale del sistema.
(in particolare, solo un valore arbitrario). Questa voce sarà la soluzione generale del sistema.
Se il sistema è omogeneo, otteniamo la soluzione generale del sistema omogeneo. I coefficienti a presi in ciascun elemento della colonna della soluzione generale costituiranno la prima soluzione dal sistema fondamentale di soluzioni, i coefficienti a - la seconda soluzione e così via.
Metodo 2: Il sistema fondamentale di soluzioni di un sistema omogeneo può essere ottenuto in un altro modo. Per fare ciò, a una variabile, trasferita sul lato destro, deve essere assegnato il valore 1 e il resto - zeri. Calcolando i valori delle variabili sul lato sinistro, otteniamo una soluzione dal sistema fondamentale. Assegnando il valore 1 all'altra variabile di destra, e gli zeri alle altre, otteniamo la seconda soluzione dal sistema fondamentale, e così via.
Definizione: il sistema è chiamato congiuntamente th, se ha almeno una soluzione, e incoerente - altrimenti, cioè nel caso in cui il sistema non abbia soluzioni. La questione se un sistema abbia una soluzione o meno è collegata non solo al rapporto tra il numero di equazioni e il numero di incognite. Ad esempio, un sistema di tre equazioni con due incognite
 |
ha una soluzione e ha anche infinite soluzioni, ma un sistema di due equazioni con tre incognite.
……. … ……
A m 1 x 1 + … + a mn x n = 0
Questo sistema è sempre coerente poiché ha una soluzione banale x 1 =…=x n =0
Perché esistano soluzioni non banali, è necessario e sufficiente
condizioni r = r(A)< n , что равносильно условию det(A)=0, когда матрица А – квадратная.
Th L'insieme delle soluzioni SLAE forma uno spazio lineare di dimensione (n-r). Ciò significa che il prodotto della sua soluzione per un numero, così come la somma e la combinazione lineare di un numero finito delle sue soluzioni, sono soluzioni di questo sistema. Lo spazio della soluzione lineare di qualsiasi SLAE è un sottospazio dello spazio R n .
Viene chiamato qualsiasi insieme di (n-r) soluzioni linearmente indipendenti di uno SLAE (che è una base nello spazio delle soluzioni) insieme fondamentale di soluzioni (FSR).
Siano х 1 ,…,х r incognite di base, х r +1 ,…,х n incognite libere. Diamo a turno i seguenti valori alle variabili libere:
……. … ……
A m 1 x 1 + … + a mn x n = 0
Forma uno spazio lineare S (spazio delle soluzioni), che è un sottospazio in R n (n è il numero di incognite), e dims=k=n-r, dove r è il rango del sistema. La base nello spazio delle soluzioni(x (1) ,…, x (k) ) è chiamata sistema fondamentale di soluzioni e la soluzione generale ha la forma:
X=c 1 x (1) + … + c k x (k) , c (1) ,…, c (k) ? R
Esempio 1. Trova una soluzione generale e qualche soluzione particolare del sistemaSoluzione fallo con una calcolatrice. Scriviamo le matrici estesa e principale: 
La matrice principale A è separata da una linea tratteggiata.Dall'alto scriviamo i sistemi incogniti, tenendo presente la possibile permutazione dei termini nelle equazioni del sistema. Determinando il rango della matrice estesa, troviamo contemporaneamente il rango di quella principale. Nella matrice B, la prima e la seconda colonna sono proporzionali. Delle due colonne proporzionali, solo una può rientrare nella minore di base, quindi spostiamo, ad esempio, la prima colonna oltre la linea tratteggiata di segno opposto. Per il sistema, questo significa il trasferimento di termini da x 1 al lato destro delle equazioni. 
Portiamo la matrice a una forma triangolare. Lavoreremo solo con le righe, poiché moltiplicare una riga di una matrice per un numero diverso da zero e sommarla a un'altra riga per il sistema significa moltiplicare l'equazione per lo stesso numero e sommarla a un'altra equazione, che non cambia la soluzione del sistema. Lavorare con la prima riga: moltiplicare la prima riga della matrice per (-3) e aggiungere a turno la seconda e la terza riga. Quindi moltiplichiamo la prima riga per (-2) e la aggiungiamo alla quarta. 
La seconda e la terza riga sono proporzionali, quindi una di esse, ad esempio la seconda, può essere barrata. Ciò equivale a cancellare la seconda equazione del sistema, poiché è una conseguenza della terza. 
Ora lavoriamo con la seconda riga: la moltiplichiamo per (-1) e la aggiungiamo alla terza. 
Il minore, cerchiato da una linea tratteggiata, ha ordine più alto(dei possibili minori) ed è diverso da zero (è uguale al prodotto degli elementi sulla diagonale principale), e tale minore appartiene sia alla matrice principale che a quella estesa, quindi rangA = rangB = 3 .
Minore  è fondamentale. Include i coefficienti per incognite x 2, x 3, x 4, il che significa che le incognite x 2, x 3, x 4 sono dipendenti e x 1, x 5 sono libere.
è fondamentale. Include i coefficienti per incognite x 2, x 3, x 4, il che significa che le incognite x 2, x 3, x 4 sono dipendenti e x 1, x 5 sono libere.
Trasformiamo la matrice, lasciando a sinistra solo la minore di base (che corrisponde al punto 4 dell'algoritmo risolutivo sopra). 
Il sistema con coefficienti di questa matrice è equivalente al sistema originale e ha la forma
Con il metodo di eliminazione delle incognite troviamo: ![]() , ,
, ,
Abbiamo relazioni che esprimono variabili dipendenti x 2, x 3, x 4 tramite x 1 e x 5 libere, ovvero abbiamo trovato una soluzione generale: 
Dando valori arbitrari alle incognite libere, otteniamo un numero qualsiasi di soluzioni particolari. Troviamo due soluzioni particolari:
1) sia x 1 = x 5 = 0, quindi x 2 = 1, x 3 = -3, x 4 = 3;
2) metti x 1 = 1, x 5 = -1, quindi x 2 = 4, x 3 = -7, x 4 = 7.
Quindi, abbiamo trovato due soluzioni: (0.1, -3,3,0) - una soluzione, (1.4, -7.7, -1) - un'altra soluzione.
Esempio 2. Indagare la compatibilità, trovare una soluzione generale e una particolare del sistema 
Soluzione. Riorganizziamo la prima e la seconda equazione per avere un'unità nella prima equazione e scriviamo la matrice B. 
Otteniamo zeri nella quarta colonna, operando sulla prima riga: 
Ora ottieni gli zeri nella terza colonna usando la seconda riga: 
 La terza e la quarta riga sono proporzionali, quindi una di esse può essere barrata senza modificare il grado:
La terza e la quarta riga sono proporzionali, quindi una di esse può essere barrata senza modificare il grado:
Moltiplica la terza riga per (-2) e aggiungi alla quarta: 
Vediamo che i ranghi delle matrici principali ed estese sono 4 e il rango coincide con il numero di incognite, quindi il sistema ha un'unica soluzione:
;
x 4 \u003d 10- 3x 1 - 3x 2 - 2x 3 \u003d 11.
Esempio 3. Esaminare la compatibilità del sistema e trovare una soluzione, se esiste. 
Soluzione. Componiamo la matrice estesa del sistema. 
 Riordina le prime due equazioni in modo che ci sia un 1 nell'angolo in alto a sinistra:
Riordina le prime due equazioni in modo che ci sia un 1 nell'angolo in alto a sinistra:
Moltiplicando la prima riga per (-1), la aggiungiamo alla terza: 
Moltiplica la seconda riga per (-2) e aggiungi alla terza: 
Il sistema è incoerente, poiché la matrice principale ha ricevuto una riga composta da zeri, che viene barrata quando viene trovato il rango, e l'ultima riga rimane nella matrice estesa, ovvero r B > r A .
Esercizio. Indagare questo sistema di equazioni per la compatibilità e risolverlo mediante calcolo matriciale.
Soluzione
Esempio. Dimostrare la compatibilità di un sistema di equazioni lineari e risolverlo in due modi: 1) con il metodo di Gauss; 2) Il metodo di Cramer. (inserisci la risposta nel modulo: x1,x2,x3)
Soluzione :doc :doc :xls
Risposta: 2,-1,3.
Esempio. Viene fornito un sistema di equazioni lineari. Dimostra la sua compatibilità. Trova una soluzione generale del sistema e una soluzione particolare.
Soluzione
Risposta: x 3 \u003d - 1 + x 4 + x 5; x 2 \u003d 1 - x 4; x 1 = 2 + x 4 - 3 x 5
Esercizio. Trova soluzioni generali e particolari per ogni sistema.
Soluzione. Studiamo questo sistema usando il teorema di Kronecker-Capelli.
Scriviamo le matrici estesa e principale:
| 1 | 1 | 14 | 0 | 2 | 0 |
| 3 | 4 | 2 | 3 | 0 | 1 |
| 2 | 3 | -3 | 3 | -2 | 1 |
| x 1 | x2 | x 3 | x4 | x5 |
Qui la matrice A è in grassetto.
Portiamo la matrice a una forma triangolare. Lavoreremo solo con le righe, poiché moltiplicare una riga di una matrice per un numero diverso da zero e sommarla a un'altra riga per il sistema significa moltiplicare l'equazione per lo stesso numero e sommarla a un'altra equazione, che non cambia la soluzione del sistema.
Moltiplica la prima riga per (3). Moltiplica la 2a riga per (-1). Aggiungiamo la 2a riga alla 1a:
| 0 | -1 | 40 | -3 | 6 | -1 |
| 3 | 4 | 2 | 3 | 0 | 1 |
| 2 | 3 | -3 | 3 | -2 | 1 |
Moltiplica la 2a riga per (2). Moltiplica la 3a riga per (-3). Aggiungiamo la 3a riga alla 2a:
| 0 | -1 | 40 | -3 | 6 | -1 |
| 0 | -1 | 13 | -3 | 6 | -1 |
| 2 | 3 | -3 | 3 | -2 | 1 |
Moltiplica la 2a riga per (-1). Aggiungiamo la 2a riga alla 1a:
| 0 | 0 | 27 | 0 | 0 | 0 |
| 0 | -1 | 13 | -3 | 6 | -1 |
| 2 | 3 | -3 | 3 | -2 | 1 |
Il minore selezionato ha l'ordine più alto (di tutti i minori possibili) ed è diverso da zero (è uguale al prodotto degli elementi sulla diagonale reciproca), e questo minore appartiene sia alla matrice principale che a quella estesa, quindi suonava (A) = rang(B) = 3 Poiché il rango della matrice principale è uguale al rango di quella estesa, allora il sistema è collaborativo.
Questo minore è di base. Include i coefficienti per incognite x 1, x 2, x 3, il che significa che le incognite x 1, x 2, x 3 sono dipendenti (di base) e x 4, x 5 sono libere.
Trasformiamo la matrice, lasciando a sinistra solo la minore di base.
| 0 | 0 | 27 | 0 | 0 | 0 |
| 0 | -1 | 13 | -1 | 3 | -6 |
| 2 | 3 | -3 | 1 | -3 | 2 |
| x 1 | x2 | x 3 | x4 | x5 |
27x3=
- x 2 + 13x 3 = - 1 + 3x 4 - 6x 5
2x 1 + 3x 2 - 3x 3 = 1 - 3x 4 + 2x 5
Con il metodo di eliminazione delle incognite troviamo:
Abbiamo relazioni che esprimono variabili dipendenti x 1, x 2, x 3 fino a x 4, x 5 libere, cioè abbiamo trovato decisione comune:
x 3 = 0
x2 = 1 - 3x4 + 6x5
x 1 = - 1 + 3x 4 - 8x 5
incerto, perché ha più di una soluzione.
Esercizio. Risolvi il sistema di equazioni.
Risposta:x 2 = 2 - 1,67x 3 + 0,67x 4
x 1 = 5 - 3,67x 3 + 0,67x 4
Dando valori arbitrari alle incognite libere, otteniamo un numero qualsiasi di soluzioni particolari. Il sistema è incerto
Studiare la compatibilità di un sistema di equazioni agebriche lineari (SLAE) significa scoprire se questo sistema ha soluzioni o meno. Bene, se ci sono soluzioni, indica quante di esse.
Avremo bisogno di informazioni dall'argomento "Sistema di equazioni algebriche lineari. Termini di base. Notazione di matrici". In particolare, sono necessari concetti come la matrice del sistema e la matrice estesa del sistema, poiché su di essi si basa la formulazione del teorema di Kronecker-Capelli. Come di consueto, la matrice del sistema sarà indicata dalla lettera $A$ e la matrice estesa del sistema dalla lettera $\widetilde(A)$.
Teorema di Kronecker-Capelli
Un sistema di equazioni algebriche lineari è consistente se e solo se il rango della matrice del sistema è uguale al rango della matrice estesa del sistema, cioè $\grado A=\rang\widetilde(A)$.
Vi ricordo che un sistema si dice giunto se ha almeno una soluzione. Il teorema di Kronecker-Capelli dice questo: se $\rang A=\rang\widetilde(A)$, allora c'è una soluzione; se $\rang A\neq\rang\widetilde(A)$, allora questo SLAE non ha soluzioni (non è coerente). La risposta alla domanda sul numero di queste soluzioni è data da un corollario del teorema di Kronecker-Capelli. L'istruzione del corollario utilizza la lettera $n$, che è uguale al numero di variabili nello SLAE dato.
Corollario del teorema di Kronecker-Capelli
- Se $\rang A\neq\rang\widetilde(A)$, lo SLAE è incoerente (non ha soluzioni).
- Se $\rang A=\rang\widetilde(A)< n$, то СЛАУ является неопределённой (имеет бесконечное количество решений).
- Se $\rang A=\rang\widetilde(A) = n$, allora lo SLAE è definito (ha esattamente una soluzione).
Si noti che il teorema formulato e il suo corollario non indicano come trovare la soluzione allo SLAE. Con il loro aiuto, puoi solo scoprire se queste soluzioni esistono o meno e, se esistono, quante.
Esempio 1
Esplora SLAE $ \left \(\begin(aligned) & -3x_1+9x_2-7x_3=17;\\ & -x_1+2x_2-4x_3=9;\\ & 4x_1-2x_2+19x_3=-42. \end(aligned )\right.$ per coerenza Se lo SLAE è coerente, indicare il numero di soluzioni.
Per scoprire l'esistenza di soluzioni per un dato SLAE, utilizziamo il teorema di Kronecker-Capelli. Abbiamo bisogno della matrice del sistema $A$ e della matrice estesa del sistema $\widetilde(A)$, le scriviamo:
$$ A=\left(\begin(array) (ccc) -3 & 9 & -7 \\ -1 & 2 & -4 \\ 4 & -2 & 19 \end(array) \right);\; \widetilde(A)=\left(\begin(array) (ccc|c) -3 & 9 &-7 & 17 \\ -1 & 2 & -4 & 9\\ 4 & -2 & 19 & -42 \end(array)\right). $$
Dobbiamo trovare $\rang A$ e $\rang\widetilde(A)$. Ci sono molti modi per farlo, alcuni dei quali sono elencati nella sezione Classifica Matrice. Di solito, per studiare tali sistemi vengono utilizzati due metodi: "Calcolo del rango di una matrice per definizione" o "Calcolo del rango di una matrice con il metodo delle trasformazioni elementari".
Metodo numero 1. Calcolo dei ranghi per definizione.
Secondo la definizione, il rango è l'ordine più alto dei minori della matrice, tra i quali ce n'è almeno uno diverso da zero. Solitamente lo studio inizia con i minori di primo ordine, ma qui è più conveniente procedere subito al calcolo del minore di terzo ordine della matrice $A$. Gli elementi del terzo ordine minore sono all'intersezione di tre righe e tre colonne della matrice in esame. Poiché la matrice $A$ contiene solo 3 righe e 3 colonne, il terzo ordine minore della matrice $A$ è il determinante della matrice $A$, cioè $\DeltaA$. Per calcolare il determinante, applichiamo la formula n. 2 dall'argomento "Formule per il calcolo dei determinanti del secondo e del terzo ordine":
$$ \Delta A=\sinistra| \begin(array) (ccc) -3 & 9 & -7 \\ -1 & 2 & -4 \\ 4 & -2 & 19 \end(array) \right|=-21. $$
Quindi, esiste un terzo ordine minore della matrice $A$, che non è uguale a zero. Un minore di 4° ordine non può essere composto, poiché richiede 4 righe e 4 colonne e la matrice $A$ ha solo 3 righe e 3 colonne. Quindi, l'ordine più alto dei minori della matrice $A$, tra i quali ce n'è almeno uno diverso da zero, è uguale a 3. Pertanto, $\rang A=3$.
Dobbiamo anche trovare $\rang\widetilde(A)$. Diamo un'occhiata alla struttura della matrice $\widetilde(A)$. Fino alla riga nella matrice $\widetilde(A)$ ci sono elementi della matrice $A$, e abbiamo scoperto che $\Delta A\neq 0$. Pertanto, la matrice $\widetilde(A)$ ha un minore di terzo ordine che non è uguale a zero. Non possiamo comporre minori di quarto ordine della matrice $\widetilde(A)$, quindi concludiamo: $\rang\widetilde(A)=3$.
Poiché $\rang A=\rang\widetilde(A)$, secondo il teorema di Kronecker-Capelli, il sistema è consistente, cioè ha una soluzione (almeno una). Per indicare il numero di soluzioni, teniamo conto che il nostro SLAE contiene 3 incognite: $x_1$, $x_2$ e $x_3$. Poiché il numero di incognite è $n=3$, concludiamo: $\rang A=\rang\widetilde(A)=n$, quindi, secondo il corollario del teorema di Kronecker-Capelli, il sistema è definito, cioè ha una soluzione unica.
Problema risolto. Quali sono gli svantaggi e i vantaggi di Da questa parte? Per prima cosa, parliamo dei professionisti. In primo luogo, dovevamo trovare un solo determinante. Successivamente, abbiamo immediatamente tratto una conclusione sul numero di soluzioni. Di solito, nei calcoli tipici standard, vengono forniti sistemi di equazioni che contengono tre incognite e hanno un'unica soluzione. Per tali sistemi questo metodo molto conveniente, perché sappiamo in anticipo che c'è una soluzione (altrimenti non ci sarebbe nessun esempio in un calcolo tipico). Quelli. resta solo per noi dimostrare che c'è una soluzione al massimo modo veloce. In secondo luogo, il valore calcolato del determinante della matrice del sistema (cioè $\Delta A$) tornerà utile in seguito: quando inizieremo a risolvere il sistema dato usando il metodo Cramer o usando la matrice inversa.
Tuttavia, per definizione, il metodo di calcolo del rango è indesiderabile se la matrice di sistema $A$ è rettangolare. In questo caso, è meglio applicare il secondo metodo, che sarà discusso di seguito. Inoltre, se $\Delta A=0$, allora non potremo dire nulla sul numero di soluzioni per un dato SLAE disomogeneo. Forse SLAE ha un numero infinito di soluzioni, o forse nessuna. Se $\Delta A=0$ allora è obbligatorio ricerca aggiuntiva, che è spesso ingombrante.
Riassumendo quanto detto, noto che il primo metodo va bene per quegli SLAE la cui matrice di sistema è quadrata. Allo stesso tempo, lo SLAE stesso contiene tre o quattro incognite ed è tratto da calcoli standard standard o lavori di controllo.
Metodo numero 2. Calcolo del rango con il metodo delle trasformazioni elementari.
Questo metodo è descritto in dettaglio nell'argomento corrispondente. Calcoleremo il rango della matrice $\widetilde(A)$. Perché le matrici $\widetilde(A)$ e non $A$? Il punto è che la matrice $A$ è una parte della matrice $\widetilde(A)$, quindi calcolando il rango della matrice $\widetilde(A)$ troveremo contemporaneamente il rango della matrice $A$ .
\begin(aligned) &\widetilde(A) =\left(\begin(array) (ccc|c) -3 & 9 &-7 & 17 \\ -1 & 2 & -4 & 9\\ 4 & - 2 & 19 & -42 \end(array) \right) \rightarrow \left|\text(scambia prima e seconda riga)\right| \rightarrow \\ &\rightarrow \left(\begin(array) (ccc|c) -1 & 2 & -4 & 9 \\ -3 & 9 &-7 & 17\\ 4 & -2 & 19 & - 42 \end(array) \right) \begin(array) (l) \phantom(0) \\ II-3\cdot I\\ III+4\cdot I \end(array) \rightarrow \left(\begin (array) (ccc|c) -1 e 2 e -4 e 9 \\ 0 e 3 e5 e -10\\ 0 e 6 e 3 e -6 \end(array) \right) \begin(array) ( l) \phantom(0) \\ \phantom(0)\\ III-2\cdot II \end(array)\rightarrow\\ &\rightarrow \left(\begin(array) (ccc|c) -1 & 2 & -4 & 9 \\ 0 & 3 &5 & -10\\ 0 & 0 & -7 & 14 \end(array) \right) \end(allineato)
Abbiamo ridotto la matrice $\widetilde(A)$ a una forma trapezoidale. Sulla diagonale principale della matrice risultante $\left(\begin(array) (ccc|c) -1 & 2 & -4 & 9 \\ 0 & 3 &5 & -10\\ 0 & 0 & -7 & 14 \end( array) \right)$ contiene tre elementi diversi da zero: -1, 3 e -7. Conclusione: il rango della matrice $\widetilde(A)$ è 3, cioè $\rank\widetilde(A)=3$. Facendo delle trasformazioni con gli elementi della matrice $\widetilde(A)$, abbiamo trasformato simultaneamente gli elementi della matrice $A$ posti prima della retta. Anche la matrice $A$ è trapezoidale: $\left(\begin(array) (ccc) -1 & 2 & -4 \\ 0 & 3 &5 \\ 0 & 0 & -7 \end(array) \right ) $. Conclusione: anche il rango della matrice $A$ è uguale a 3, cioè $\grado A=3$.
Poiché $\rang A=\rang\widetilde(A)$, secondo il teorema di Kronecker-Capelli, il sistema è consistente, cioè ha una soluzione. Per indicare il numero di soluzioni, teniamo conto che il nostro SLAE contiene 3 incognite: $x_1$, $x_2$ e $x_3$. Poiché il numero di incognite è $n=3$, concludiamo: $\rang A=\rang\widetilde(A)=n$, quindi, secondo il corollario del teorema di Kronecker-Capelli, il sistema è definito, cioè ha una soluzione unica.
Quali sono i vantaggi del secondo metodo? Il vantaggio principale è la sua versatilità. Non ci importa se la matrice del sistema è quadrata o meno. Inoltre, abbiamo effettivamente effettuato trasformazioni del metodo di Gauss in avanti. Mancano solo un paio di passaggi e potremmo ottenere la soluzione di questo SLAE. A dire il vero, mi piace più il secondo modo del primo, ma la scelta è una questione di gusti.
Risposta: Lo SLAE dato è coerente e definito.
Esempio #2
Esplora SLAE $ \left\( \begin(aligned) & x_1-x_2+2x_3=-1;\\ & -x_1+2x_2-3x_3=3;\\ & 2x_1-x_2+3x_3=2;\\ & 3x_1- 2x_2+5x_3=1;\\ & 2x_1-3x_2+5x_3=-4.\end(allineato) \right.$ per coerenza.
Troveremo i ranghi della matrice del sistema e la matrice estesa del sistema con il metodo delle trasformazioni elementari. Matrice di sistema estesa: $\widetilde(A)=\left(\begin(array) (ccc|c) 1 & -1 & 2 & -1\\ -1 & 2 & -3 & 3 \\ 2 & -1 & 3 & 2 \\ 3 & -2 & 5 & 1 \\ 2 & -3 & 5 & -4 \end(array) \right)$. Troviamo i ranghi richiesti trasformando la matrice aumentata del sistema:

La matrice estesa del sistema è ridotta a una forma a gradini. Se la matrice viene ridotta a una forma a gradini, il suo rango è uguale al numero di righe diverse da zero. Pertanto, $\rank A=3$. La matrice $A$ (fino alla linea) è ridotta a una forma trapezoidale e il suo rango è uguale a 2, $\rang A=2$.

Poiché $\rang A\neq\rang\widetilde(A)$, quindi, secondo il teorema di Kronecker-Capelli, il sistema è incoerente (cioè non ha soluzioni).
Risposta: Il sistema è incoerente.
Esempio #3
Esplora SLAE $ \left\( \begin(aligned) & 2x_1+7x_3-5x_4+11x_5=42;\\ & x_1-2x_2+3x_3+2x_5=17;\\ & -3x_1+9x_2-11x_3-7x_5=-64 ;\\ & -5x_1+17x_2-16x_3-5x_4-4x_5=-90;\\ & 7x_1-17x_2+23x_3+15x_5=132. \end(aligned) \right.$ per compatibilità.
La matrice di sistema estesa è: $\widetilde(A)=\left(\begin(array) (ccccc|c) 2 & 0 & 7 & -5 & 11 & 42\\ 1 & -2 & 3 & 0 & 2 & 17 \\ -3 & 9 & -11 & 0 & -7 & -64 \\ -5 & 17 & -16 & -5 & -4 & -90 \\ 7 & -17 & 23 & 0 & 15 & 132 \end(array)\right)$. Scambia la prima e la seconda riga di questa matrice in modo che il primo elemento della prima riga sia uno: $\left(\begin(array) (ccccc|c) 1 & -2 & 3 & 0 & 2 & 17\\ 2 & 0 & 7 & -5 & 11 & 42 \\ -3 & 9 & -11 & 0 & -7 & -64 \\ -5 & 17 & -16 & -5 & -4 & -90 \\ 7 & -17 e 23 e 0 e 15 e 132 \end(array) \right)$.

Abbiamo ridotto la matrice estesa del sistema e la matrice del sistema stesso ad una forma trapezoidale. Il rango della matrice estesa del sistema è pari a tre, anche il rango della matrice del sistema è pari a tre. Poiché il sistema contiene $n=5$ incognite, cioè $\rang\widetilde(A)=\grado A< n$, то согласно следствия из теоремы Кронекера-Капелли questo sistemaè indefinito, cioè ha un numero infinito di soluzioni.
Risposta: il sistema è indeterminato.
Nella seconda parte, analizzeremo esempi che spesso sono inclusi nei calcoli standard o nei test di matematica superiore: lo studio della compatibilità e la soluzione dello SLAE a seconda dei valori dei parametri in esso inclusi.
- Sistemi m equazioni lineari con n sconosciuto.
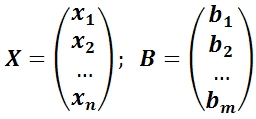
Risoluzione di un sistema di equazioni lineariè un tale insieme di numeri ( x 1 , x 2 , …, x n), sostituendo quale in ciascuna delle equazioni del sistema si ottiene l'uguaglianza corretta.
dove a ij , io = 1, …, m; j = 1, …, n sono i coefficienti del sistema;
b io , io = 1, …, m- membri liberi;
x j , j = 1, …, n- sconosciuto.
Il sistema di cui sopra può essere scritto in forma matriciale: A X = B,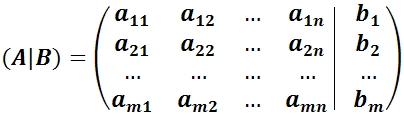
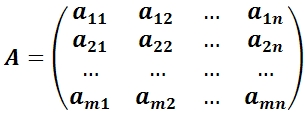
dove ( UN|B) è la matrice principale del sistema;
UN— matrice estesa del sistema;
X— colonna delle incognite;
Bè una colonna di membri gratuiti.
Se la matrice B non è una matrice nulla ∅, allora questo sistema di equazioni lineari è detto disomogeneo.
Se la matrice B= ∅, allora questo sistema di equazioni lineari è detto omogeneo. Un sistema omogeneo ha sempre una soluzione nulla (banale): x 1 \u003d x 2 \u003d ..., x n \u003d 0.
Sistema congiunto di equazioni lineariè un sistema di equazioni lineari che ha una soluzione.
Sistema incoerente di equazioni lineariè un sistema di equazioni lineari che non ha soluzione.
Certi sistemi di equazioni lineariè un sistema di equazioni lineari che ha una soluzione unica.
Sistema indefinito di equazioni lineariè un sistema di equazioni lineari che ha un numero infinito di soluzioni. - Sistemi di n equazioni lineari con n incognite
Se il numero di incognite è uguale al numero di equazioni, la matrice è quadrata. Il determinante della matrice è chiamato determinante principale del sistema di equazioni lineari ed è indicato dal simbolo Δ.
Metodo Cramer per i sistemi risolutivi n equazioni lineari con n sconosciuto.
La regola di Cramer.
Se il determinante principale di un sistema di equazioni lineari non è uguale a zero, il sistema è coerente e definito e l'unica soluzione viene calcolata utilizzando le formule di Cramer:
dove Δ i sono le determinanti ottenute dal determinante principale del sistema Δ sostituendo io a colonna alla colonna dei membri liberi. . - Sistemi di m equazioni lineari con n incognite
Teorema di Kronecker-Cappelli.
Perché questo sistema di equazioni lineari sia coerente, è necessario e sufficiente che il rango della matrice del sistema sia uguale al rango della matrice estesa del sistema, rango(Α) = rango(Α|B).
Se una suonato(Α) ≠ suonato(Α|B), quindi il sistema ovviamente non ha soluzioni.
Se rango(Α) = rango(Α|B), allora sono possibili due casi:
1) suonato(Α) = n(al numero di incognite) - la soluzione è unica e può essere ottenuta con le formule di Cramer;
2) rango (Α)< n − ci sono infinite soluzioni. - Metodo Gauss per la risoluzione di sistemi di equazioni lineari
Componiamo la matrice aumentata ( UN|B) del dato sistema di coefficienti ai lati incogniti e di destra.
Il metodo gaussiano o metodo dell'eliminazione delle incognite consiste nel ridurre la matrice aumentata ( UN|B) con l'aiuto di trasformazioni elementari sulle sue file in una forma diagonale (in una forma triangolare superiore). Tornando al sistema di equazioni, si determinano tutte le incognite.
Le trasformazioni elementari sulle stringhe includono quanto segue:
1) scambiare due righe;
2) moltiplicare una stringa per un numero diverso da 0;
3) aggiungere alla stringa un'altra stringa moltiplicata per un numero arbitrario;
4) scartare una stringa nulla.
Corrisponde una matrice estesa ridotta a una forma diagonale sistema lineare, equivalente a quello dato, la cui soluzione non crea difficoltà. . - Sistema di equazioni lineari omogenee.
Il sistema omogeneo ha la forma:
corrisponde all'equazione della matrice AX = 0.
1) Un sistema omogeneo è sempre consistente, poiché r(A) = r(A|B), c'è sempre una soluzione zero (0, 0, …, 0).
2) Perché un sistema omogeneo abbia una soluzione diversa da zero, è necessario e sufficiente che r = r(A)< n , che equivale a Δ = 0.
3) Se r< n , allora Δ = 0, allora ci sono incognite libere c 1 , c 2 , …, c n-r, il sistema ha soluzioni non banali e ce ne sono infinite.
4) Soluzione generale X a r< n può essere scritto in forma matriciale come segue:
X \u003d c 1 X 1 + c 2 X 2 + ... + c n-r X n-r,
dove sono le soluzioni X 1 , X 2 , …, X n-r costituiscono un sistema fondamentale di soluzioni.
5) Il sistema fondamentale delle soluzioni si ottiene dalla soluzione generale del sistema omogeneo: ,
,
se in sequenza assumiamo che i valori dei parametri siano (1, 0, …, 0), (0, 1, …, 0), …, (0, 0, …,1).
Scomposizione della soluzione generale in termini di sistema fondamentale di soluzioniè una registrazione della soluzione generale come combinazione lineare di soluzioni appartenenti al sistema fondamentale.
Teorema. Affinché un sistema di equazioni lineari omogenee abbia una soluzione diversa da zero, è necessario e sufficiente che Δ ≠ 0.
Quindi, se il determinante Δ ≠ 0, allora il sistema ha un'unica soluzione.
Se Δ ≠ 0, allora il sistema di equazioni lineari omogenee ha un numero infinito di soluzioni.
Teorema. Perché un sistema omogeneo abbia una soluzione diversa da zero, è necessario e sufficiente che RA)< n .
Prova:
1) r non può essere di più n(il rango della matrice non supera il numero di colonne o righe);
2) r< n , perché Se r=n, quindi il determinante principale del sistema Δ ≠ 0 e, secondo le formule di Cramer, esiste un'unica soluzione banale x 1 \u003d x 2 \u003d ... \u003d x n \u003d 0, che contraddice la condizione. Significa, RA)< n .
Conseguenza. Per un sistema omogeneo n equazioni lineari con n incognite ha una soluzione diversa da zero, è necessario e sufficiente che Δ = 0.
dove X* - una delle soluzioni del sistema disomogeneo (2) (ad esempio (4)), (MI-LA + LA) forma il kernel (spazio zero) della matrice UN.
Facciamo una decomposizione scheletrica della matrice (MI-LA + LA):
MI-LA + LA=Q S
dove Q n×n-r- matrice di rango (Q)=n-r, S n−r×n-matrice di rango (S)=n-r.
Allora (13) può essere scritto nella forma seguente:
x=x*+Qk, ∀ K ∈ R n-r .
dove k=Mis.
Così, procedura di soluzione generale sistema di equazioni lineari usando pseudo matrice inversa può essere presentato nella seguente forma:
- Calcola la matrice pseudoinversa UN + .
- Calcoliamo una soluzione particolare del sistema disomogeneo di equazioni lineari (2): X*=UN + b.
- Verifichiamo la compatibilità del sistema. Per questo calcoliamo aa + b. Se una aa + b≠b, allora il sistema è incoerente. In caso contrario, continuiamo la procedura.
- vyssylyaem E-A+A.
- Fare una decomposizione scheletrica MI-LA + LA=Q·S.
- Costruire una soluzione
x=x*+Qk, ∀ K ∈ R n-r .
Risolvere un sistema di equazioni lineari online
Il calcolatore online permette di trovare la soluzione generale di un sistema di equazioni lineari con spiegazioni dettagliate.